
Design and Testing of Electric Whipstock with Gear Transmission for Coiled Tubing Drilling
-
摘要:
定向器是连续管钻井中实现定向作业的必备工具,其中电动定向器能够连续准确地调整工具面角,具有很大的技术优势,但受限于井下狭小径向空间和定向作业大扭矩要求,其中关键部件齿轮减速器是设计的难点。设计了一种基于大扭矩电机和多级行星齿轮减速器相配合的电动定向器,对其行星减速齿轮进行了优化,以弯曲疲劳强度安全系数、接触疲劳强度安全系数和输出扭矩3个关键参数的乘积为优化依据,得到了在要求空间下的最优齿数比,并对其进行了有限元强度校核和实际承载能力室内试验。研究结果表明,电动定向器两级行星齿轮减速器的实际承载能力超过800 N·m的设计目标,瞬时可达1 260 N·m,满足现场连续管钻井定向作业要求。研究结果为今后电动定向器设计和加工组装提供了参考。
Abstract:Whipstock is essential for directional drilling with coiled tubing, and the electric whipstock offers great technical advantages with its ability to make continuous and accurate tool face angle adjustments. However, due to narrow downhole radial space and high torque requirements for directional drilling, the design of the key structure in the electric whipstock, namely the gear reducer, becomes a difficult point of development. Therefore, a kind of electric whipstock based on a high-torque motor and multi-stage planetary gear reducer was designed, and the planetary gear reducer was optimized. The product of three key parameters, i.e, bending fatigue strength safety factor, contact fatigue strength safety factor, and output torque, was used as the basis for optimization so that the optimal gear ratio was obtained under the required space, and the finite-element strength calibration and the actual load carrying capacity of the gear reducer tests were carried out. The results show that the actual load bearing capacity of the designed two-stage planetary gear reducer of the electric whipstock exceeds the design target of 800 N·m, and the instantaneous capacity can reach 1 260 N·m, which meets the requirements of directional drilling operation of the coiled tubing drilling in the field. The research results can provide a reference for the design and processing assembly of future electric whipstock.
-
Keywords:
- coiled tubing drilling /
- electric whipstock /
- planetary gear reducer /
- gear ratio
-
我国大多数油田以注水开发为主,精细注水是油田稳油控水的主要手段[1–3]。随着高强度注水开发,储层非均质性日臻明显,层间、层内和平面上渗透率变化大[4–6],注入水总沿高渗透带推进,导致油井产量下降,严重影响油气田的开发和经济效益[7–9]。因此,需实时监测储层参数,及时掌握储层动态变化[10],为调整开采策略和提高采收率提供支撑。套后地层电阻率是储层评价的重要物理量之一,目前国内外的测量方法主要有井间电位探测、低频电磁探测、过套管瞬变电磁探测等[11–14]。然而,由于金属套管对电磁信号具有屏蔽效应,上述方法存在检测效率低、径向探测距离有限等问题[15–17]。瞬变电磁套后储层监测系统结构简单,通过磁性线圈式接收天线能够采集微弱磁场信号,实现地层电阻率分析,受到越来越多研究人员的关注[18–21]。但是,对于射孔或筛管的产层段,电磁感应受套管非均匀性的影响,探测距离精度严重受损。考虑到线源激励在远距离探测中的强激励场优势以及瞬变电磁法的微弱信号采集优势,将二者结合可以实现过套管探测的强磁场激励与弱信号采集,有利于提升探测距离。
现有的线源探测方法主要用于探测井底或井间的异常体[22–23],在单井探测领域鲜少发现相关应用。为此,建立基于线源的套后储层监测系统并开展仿真模拟分析,将套管视为一段线源,在套管中设置电极形成激励,分析套后磁场分布,优化线源长度以及电极的排布位置,为单井套后储层远距离探测提供数值参考和理论依据。
1. 基于线源的套后储层监测理论
基于线源的套后储层监测通过激励电极将电流导入套管或筛管,间隔一段距离设置回路电极,在套管上形成线电流源,通过调整激励电极和回路电极间距,可改变探测距离以适应不同井况和储层。如图1所示,在基于线源的套后储层监测系统中,线源沿井轴方向(z方向)布设,因此,其激励的一次电场仅存在Ez分量,由该交流激励产生的磁场则包括Hx分量和Hy分量,相对于线源方向,场为水平极化波。
![]() 图 1 基于线源的套后储层监测系统Figure 1. Post-casing reservoir detection model based on line source
图 1 基于线源的套后储层监测系统Figure 1. Post-casing reservoir detection model based on line source在利用线源发射过程中,因为套管直径远远小于套管长度,可将套管作为线电流源处理。基于线源的套后储层监测系统通过向地下发射电磁波并接收其产生的二次场来反映地下目标的物理参数。该系统由发射线源和接收部分2个主要部分构成。对发射体施加交流电,使电磁波在地层中传播并产生电动势,根据电磁感应原理,电动势在接收线圈中被感应出来。通过接收元件采集到激发出的二次场,进而确定井周介质信息,有效区分套后介质的电性差异,反演出生产过程中储层动态变化或水油分布的情况。
2. 基于COMSOL的套后储层监测系统
2.1 线源法储层监测系统构建
线源法将套管作为线源,可以施加更大的电流,通过安置的双电极紧贴于套管内壁,将金属套管作为激励形成一段线电流源,接收阵列位于套管内,并通过观测不同位置的接收电极响应,实现套后储层远距离监测。该线源结构的优点是可进一步提高识别套后储层电阻率的准确性。通过将双电极灵活地放置在待监测井段,与传统电磁发射方式相比,双电极体系会使施加在套管上的电流更大,所形成磁场更有聚焦性,这有利于提升探测的有效性和可靠性,对应COMSOL中的三维线源模型如图2所示。
在COMSOL构建的柱状模型中,初步设定了1 m长的套管作为线源,储层电导率设置为1s/m,套管的电导率为1.12 e7s/m,磁芯电导率为1s/m,空气为1 e−7s/m。
2.2 网格剖分
套后储层监测系统主要包含套后的多层介质模型和双层管柱模型剖分,模型网格划分的原则遵循由内到外、由密到疏的原则,套管作为模型最薄的区域应首先进行剖分。对于产层段双层管柱,由外到内分别是水泥环、套管、井液、管内空气等多层介质。随后添加水层与油层,建立油水界面三维模型。将长方体作为地层,圆柱水层与油层相邻,固定水层半径20 m、油层半径固定在5 m、高50 m,与线源保持一致,油层电导率设置为2 e−3s/m,水为0.2 s/m,接收探头置于管柱内部,探头参数与以上相同。6个面仍然设置为无限元域,具体设置和网格划分如图3所示。
![]() 图 3 基于线源发射的水油界面剖分模型Figure 3. Water oil interface dissection model based on line source emission
图 3 基于线源发射的水油界面剖分模型Figure 3. Water oil interface dissection model based on line source emission2.3 激励源的加载与求解
在AC/DC模块中,选择时域磁场,在磁场中设置线源激励电流,模拟电极发射电流施加在套管上,从而形成一段边电流,研究步骤选择瞬态,信号为阶跃信号,设置关断时刻为0.5 s,幅值为2 A。模型外部边界条件设置为磁绝缘,初始值磁矢势为0。
根据以上激励设置,首先验证均匀全空间垂直线源电磁场分布情况。设定整个全空间地层电阻率为1 Ω·m,线源供电为2A,垂直线源居中放置,线源端点分别距离上下地层边界15 m,求解后的三维空间的磁场分布如图4(a)所示,二维横向切面磁场线的分布如图4(b)所示。
3. 基于线源的套后储层监测影响因素分析
3.1 线源电流影响
在实际储层探测中,对于不同的套管井,研究不同的线源电流对探测性能的影响。设置储层电导率为1 s/m,线源长度L为50 m,当线源电流I分别为10,20,30,40和50A时,距离线源5,10,15和20 m处的磁场强度如图5所示。
![]() 图 5 线源电流与磁场强度的对应关系Figure 5. Corresponding relationship between line source current and magnetic field strength
图 5 线源电流与磁场强度的对应关系Figure 5. Corresponding relationship between line source current and magnetic field strength磁场强度与电流成正相关趋势,以5 m为例,当电流为10 A时,磁场强度约为1.51×10 e−10T;当电流增至2倍20 A时,磁场强度大小为2.3×10 e−10T,磁场强度增大至1.5倍;电流增加至3倍30 A时,约为10 A电流时的2.5倍。以此类推,当电流为50 A时,磁场强度约为10 A电流的4.5倍,即发射电流越大,在同一位置所接收到的磁场强度越高,信噪比也就越高。
3.2 线源长度影响
线源的长度即人为设置的两个触点的距离。在实际的测井中,可以通过下放工具任意改变发射线源的长度,以此调整信号的传输效果,找到最适合的测井参数。首先建立基本的线源长度变化正演模型,固定一个发射电极的位置不变,设置线源起始点,将其坐标记为(x, z)=(0, 550),改变每段线源的长度L为沿起始点下延,依次为100,200,300,400,500 m,观测线始终为每段线源的z=L/2处。发射电流为10 A,计算时间范围为0~100 ms,步长为1 ms,不同线源长度时z=L/2处电场Ex分量随时间变化的响应图如图6所示。
随线源发射长度不断增加,Ex分量瞬变响应的幅值呈现先上升后下降的趋势,具体为在300 m处达到峰值,随线源发射长度继续增大,Ex分量的最大值响应有减小的趋势,Ex分量的大小可反应线源长度对横轴径向距离的探测能力。因此在实际测井,在兼顾成本的情况下应加大线源长度,优选值为300 m左右。
3.3 套管厚度对套后储层监测性能的影响
选取外径为139.70 mm的套管,套管的厚度分别为7.72 mm,9.17 mm,10.54 mm,分析套管厚度对于径向探测距离的影响,套管长度均为50 m,电导率为1.12e7s/m。不同套管厚度参数条件下接收的电场响应幅度曲线如图7所示。
![]() 图 7 套管厚度与电场强度的对应关系Figure 7. Correspondence between casing thickness and electric field strength
图 7 套管厚度与电场强度的对应关系Figure 7. Correspondence between casing thickness and electric field strength保证其他条件不变,只改变套管厚度,套管2~20 m径向距离处,每个壁厚对应不同衰减曲线,当壁厚值增加时,同一径向距离下对应的电场强度值越高。由于线电流施加在套管上,壁厚的增加意味着同样的电流可以激发更大的电磁场,使得二次电流在套管内的衰减速度下降,因此电场值上升;随着套管壁厚减小,感应电场幅值明显下降。
在实际探测中,由于井下复杂环境及金属套管的存在,可能会导致探测信号局部异常,从而影响解释结果的准确性。当前研究的主要目的是验证利用金属套管构建瞬变电磁线源激励,并利用磁性接收天线完成信号采集的探测方法可行性。在后续的研究工作中,还需进一步优化分析来提升探测性能及解释结果的可靠性。
4. 线源法套后储层油水界面监测仿真与试验
4.1 水油界面仿真分析
储层开采过程中的流体运移会导致套后储层的孔隙流体和电阻率的变化,瞬变信号在衰减时与均匀地层衰减情况区别明显,尤其是在油气开采的产层段,开采过程中也会造成水油界面的移动,因此,有必要研究响应信号的衰减过程。
根据水油界面模型,保持水层与油层的坐标不变,只改变油层的半径,依次设置为r为5, 10和 15 m,以此来模拟水油界面的移动。在激励关断后的同一个时间范围内观察接收到的电压信号值,如图8所示,油体半径变化时对应的观测电压值。
![]() 图 8 水油界面移动与观测值的对应关系Figure 8. Correspondence between water oil interface movement and observed values
图 8 水油界面移动与观测值的对应关系Figure 8. Correspondence between water oil interface movement and observed values在激励电流关断后的同一时间范围内,油体半径增大造成界面移动,r =5 m时,最小接收信号的幅值出现在32 ms;r =10 m时,最小接收信号幅值出现在31.5 ms;r =15 m时,最小接收信号幅值出现在30.5 ms。接收到的电压信号随着水油界面的移动而产生相应的偏移。
4.2 水体远近识别测试
拼接2根长度为1 m的试验套管,作为试验线源横置于试验场地中。移动探测线源,固定水池位置,同步改变套管、探头与水池距离,在此过程中,探头始终放置在套管内部不动,保持稳压电源输出电流不变,以此模拟不同的油水界面、注水突进前沿和电阻率变化情况。在试验过程中,将线源探头以1 m为单位进行移动,线源每隔水池n m(n=1,2,3,4,5,10,15,20,30)就放置一个水瓶标志,观察信号的变化。通过移动线源,调整线源与塑料水池间距离,模拟实际试验环境中线源与监测层间不同距离。
分别对1,2,3 ,4,5,10,15 ,20和30 m所测信号进行精细化处理,并对比处理结果与传统的线圈式探测工具探测结果,如图9所示。当线源或常规测试工具与水池相距较远,20~30 m的过程中,线源方法和常规方法的接收信号几乎无变化。从20 m移动至15 m,再推进至10 m时,线源方法的接收信号强度逐渐增强,而常规方法接收信号仍无变化;当线源距水池较近时,在0~10 m范围内,随距离变近,信号幅值明显增强,而常规测试工具距水池距离8 m时,测试信号才开始出现变化。此外,当线源与水池的距离与常规测试工具与水池距离相等时,线源测试信号均大于常规方法测试信号,验证了线源系统的可靠性。
![]() 图 9 精细化处理后不同方法信号强度对比图Figure 9. Comparison of signal strength between different methods after fine processing
图 9 精细化处理后不同方法信号强度对比图Figure 9. Comparison of signal strength between different methods after fine processing5. 结 论
1)将套管作为线源,能够施加更大的电流激励,产生的二次场信号强度与线源激励电流呈正相关,套管壁厚越大,电场响应幅值越高。
2)地面模拟试验表明,在距离线源15 m范围内,基于线源的套后储层监测系统对水质远近识别具有较好的区分能力。
3)后续还需进一步分析复杂环境下线源的优化构建方式以及接收天线的优化设计,并结合适用于套管井中复杂环境的信号处理方法来提升探测性能及解释结果的可靠性。
-
![]()
图 2 模式转换机构工作过程
1.输出级行星架;2.上花键副;3.锥形摩擦副;4.锁紧滑套;5.模式转换机构外壳;6.下花键副;7.输出轴
Figure 2. Process of mode shifting mechanism
![]()
图 3 连续管钻井电动定向器结构示意
1.减速电机;2.中间级行星减速器;3.空心轴;4.输出级行星减速器;5.模式转换机构;6.输出轴
Figure 3. Structure of electric whipstock for coiled tubing drilling
![]()
图 4 中间级减速器在不同配齿数量下弯曲疲劳强度与接触疲劳强度的安全系数
Figure 4. Safety factor for bending and contact fatigue strength of intermediate stage reducers under different tooth numbers
![]()
图 5 输出级减速器在不同配齿数量下优化指标的分布
Figure 5. Optimization indicator distribution of output stage reducers under different tooth numbers
![]()
图 7 无安装误差时不同转角下应力的分布
Figure 7. Stress distribution at different rotating angles without installation error
![]()
图 8 有安装误差时不同转角下应力的分布
Figure 8. Stress distribution at different rotating angles with installation error
![]()
图 11 不同啮合状态下轮齿接触应力的分布
Figure 11. Contact stress distribution of gear teeth under different meshing states
![]()
图 12 试验装置工作原理
1.试验机机架;2.加载装置;3.联轴器;4.太阳轮输入轴;5.减速器外壳;6.摩擦块;7.紧定螺钉;8.承载套筒;9.行星架输出轴;10.联轴器;11.扭矩传感器;12.行星架输入轴;13.太阳轮输出轴
Figure 12. Working principle of experimental device
![]()
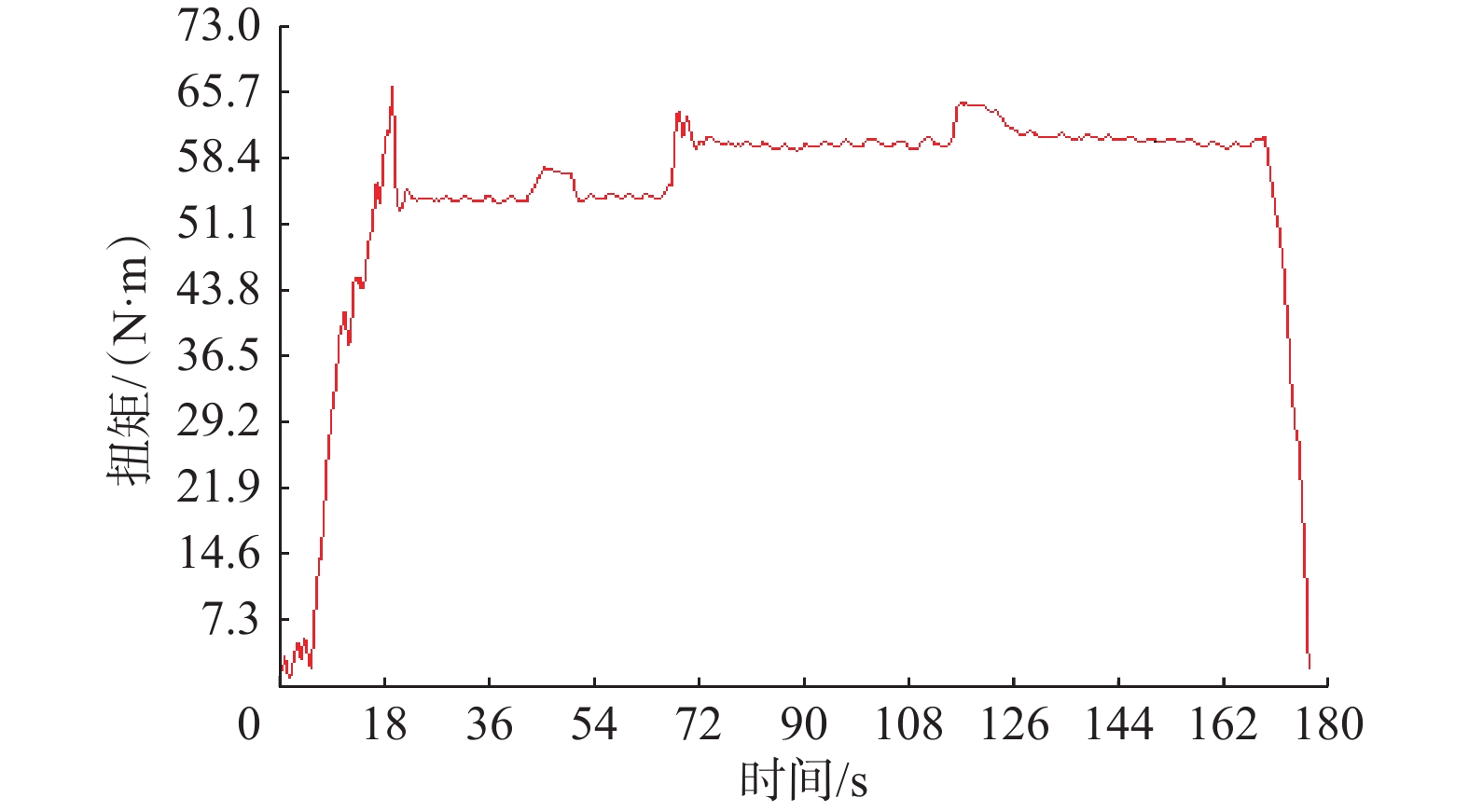
图 13 行星减速器输入扭矩随时间变化的曲线
Figure 13. Variation of input torque of planetary reducer with time
-
[1] 贺会群. 连续油管技术与装备发展综述[J]. 石油机械,2006,34(1):1–6. doi: 10.3969/j.issn.1001-4578.2006.01.001 HE Huiqun. Development of coiled tubing technique and equipment[J]. China Petroleum Machinery, 2006, 34(1): 1–6. doi: 10.3969/j.issn.1001-4578.2006.01.001
[2] 胡亮,高德利. 连续管钻定向井工具面角调整方法研究[J]. 石油钻探技术,2015,43(2):50–53. HU Liang, GAO Deli. Study on a method for tool face re-orientation with coiled tubing drilling[J]. Petroleum Drilling Techniques, 2015, 43(2): 50–53.
[3] 贾涛,张燕萍,吴千里. 连续管侧钻技术的研究及现场试验[J]. 石油机械,2017,45(7):30–33. JIA Tao, ZHANG Yanping, WU Qianli. Research and field test of coiled tubing sidetracking technology[J]. China Petroleum Machinery, 2017, 45(7): 30–33.
[4] CHOUDHARY A, MENEZES R, OGRA R, et al. Hybrid drilling rig with rotating coiled tubing[R]. SPE 112888, 2008.
[5] 李寅,尹方雷,白冬青. 连续管钻井技术研究进展及应用[J]. 焊管,2023,46(7):71–75. LI Yin, YIN Fanglei, BAI Dongqing. Research progress and application of coiled tubing drilling technology[J]. Welded Pipe and Tube, 2023, 46(7): 71–75.
[6] 苗芷芃,万教育,徐华冬,等. 连续管钻井液压定向器的设计与室内试验评价[J]. 石油管材与仪器,2021,7(4):5–8. MIAO Zhipeng, WAN Jiaoyu, XU Huadong, et al. Development and laboratory test of continuous pipe drilling orientation tool[J]. Petroleum Tubular Goods & Instruments, 2021, 7(4): 5–8.
[7] ROSS M, ANYANWU O N, KLOTZ C, et al. Rib-steered motor technology: The revolutionary approach extends the coiled tubing drilling application scope[R]. SPE 153573, 2012.
[8] 邢志晟,孔璐琳,祝传增,等. 连续管钻井肋式定向器执行机构偏置位移优化[J]. 石油机械,2023,51(2):26–32. XING Zhisheng, KONG Lulin, ZHU Chuanzeng, et al. Research on optimization of actuator offset displacement of rib-type orientation tool for coiled tubing drilling[J]. China Petroleum Machinery, 2023, 51(2): 26–32.
[9] MEEK D E, LEISING L J, ROWATT J D. Apparatus and method for orienting a downhole tool: US 6419014 B1[P]. 2002-07-16.
[10] ZEGARRA E, MEEK D, UDO C, et al. Intelligent wireless orienter for coiled tubing drilling: development to field test[R]. SPE 74836, 2002.
[11] 苗芷芃,夏宏南,南丽华,等. 连续管钻井液压定向器的研制[J]. 石油机械,2019,47(6):22–27. MIAO Zhipeng, XIA Hongnan, NAN Lihua, et al. Hydraulic orientation tool for coiled tubing drilling[J]. China Petroleum Machinery, 2019, 47(6): 22–27.
[12] 胡亮,阮臣良,崔晓杰,等. 新型连续管钻井用电液定向装置的研制[J]. 石油钻采工艺,2019,41(6):728–733. HU Liang, RUAN Chenliang, CUI Xiaojie, et al. The development of a novel electric-hydraulic orienter used for coiled tubing drilling[J]. Oil Drilling & Production Technology, 2019, 41(6): 728–733.
[13] 马卫国,王力,王程飞. 连续管钻井电液双螺旋传动定向器的设计[J]. 石油机械,2020,48(4):37–42. MA Weiguo, WANG Li, WANG Chengfei. Design of electro-hydraulic double helix drive orienter for coiled tubing drilling[J]. China Petroleum Machinery, 2020, 48(4): 37–42.
[14] 李猛,贺会群,张云飞,等. 连续管钻井定向器技术现状与发展建议[J]. 石油机械,2015,43(1):32–37. doi: 10.3969/j.issn.1001-4578.2015.01.007 LI Meng, HE Huiqun, ZHANG Yunfei, et al. The status quo and development suggestion on the coiled tubing drilling orienter[J]. China Petroleum Machinery, 2015, 43(1): 32–37. doi: 10.3969/j.issn.1001-4578.2015.01.007
[15] 李猛,贺会群,都亚男,等. 连续管钻井电液定向器结构设计[J]. 石油机械,2015,43(11):1–6. LI Meng, HE Huiqun, DU Yanan, et al. Structure design of CTD electric-over-hydraulic orienter[J]. China Petroleum Machinery, 2015, 43(11): 1–6.
[16] THATCHER D A A, SZUTIAK G A, LEMAY M M. Integration of coiled tubing underbalanced drilling services to improve efficiency and value[R]. SPE 60708, 2000.
[17] TURNER D R, HARRIS T W R, SLATER M, et al. Electric coiled tubing drilling: A smarter CT drilling system[R]. SPE 52791, 1999.
[18] ANDERSON D R, DOREL A, MARTIN R. A new, integrated, wireline-steerable, bottom hole assembly brings rotary drilling-like capabilities to coiled tubing drilling[R]. SPE 37654, 2008.
[19] 张展,武文辉. 2K−H型行星齿轮装置设计[J]. 矿山机械,2020,48(11):45–49. doi: 10.3969/j.issn.1001-3954.2020.11.010 ZHANG Zhan, WU Wenhui. Design of 2K-H planetary gear device[J]. Mining & Processing Equipment, 2020, 48(11): 45–49. doi: 10.3969/j.issn.1001-3954.2020.11.010
[20] OHLINGER J J, GANTT L L, MCCARTY T M. A comparison of mud pulse and E-line telemetry in Alaska CTD operations[R]. SPE 74842, 2002.
[21] 张展. 实用齿轮设计计算手册[M]. 北京:机械工业出版社,2010:695-698. ZHANG Zhan. Practical gear design and calculation[M]. Beijing: China Machine Press, 2010: 695-698.

 下载:
下载:





















计量
- 文章访问数: 10
- HTML全文浏览量: 2
- PDF下载量: 5





